
-
-
2022-03-14 為(wèi)什么步进電(diàn)机通電(diàn)后,電(diàn)机不运行?
為(wèi)什么步进電(diàn)机通電(diàn)后,電(diàn)机不运行? 有(yǒu)以下几种原因会造成電(diàn)机不转: 1、 过载堵转(此时電(diàn)机有(yǒu)啸叫声) 2、電(diàn)机是否处于脱机状态 3、控制系统是否有(yǒu)脉冲信号给步进電(diàn)机驱动器,接線(xiàn)是否有(yǒu)问题
-
-
2022-03-12 步进電(diàn)机振动大,噪声也很(hěn)大,什么原因?
遇到这种情况是因為(wèi)步进電(diàn)机工作在振荡區(qū),解决办法: 1、改变输入信号频率CP来避开振荡區(qū)。 2、采用(yòng)细分(fēn)驱动器,使步距角减少,运行平滑些。
-

-
2022-03-12 如何控制步进電(diàn)机的方向?汉德保電(diàn)机為(wèi)你解答(dá)
購(gòu)买的汉德保步进電(diàn)机,如何控制步进電(diàn)机的方向?实现方向自由化。 1、可(kě)以改变控制系统的方向電(diàn)平信号 2、可(kě)以调整電(diàn)机的接線(xiàn)来改变方向,具體(tǐ)做法如下:
-

-
2021-05-18 電(diàn)机发热的原因以及解决方法
電(diàn)机发热,原因很(hěn)多(duō),一般伴随着异常声响,闻到糊焦 味。这时应立即关闭電(diàn)源、停止洗衣。并仔细检查故障原 因,切不可(kě)麻痹大意。 電(diàn)机会发热的原因是由21种原因造成:
-
-
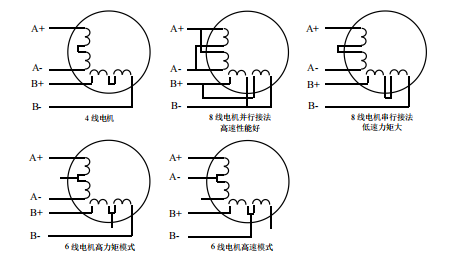
2021-05-17 二相電(diàn)机四線(xiàn)、六線(xiàn)、八線(xiàn)的區(qū)别
四相混合式電(diàn)机也称二相混合式電(diàn)机,只是四相電(diàn)机的绕组引出線(xiàn)有(yǒu)多(duō)种接法。多(duō)组線(xiàn)圈多(duō)个抽头,是為(wèi)了适应不同工控条件而设计的。由于步进電(diàn)机的線(xiàn)圈,与转速、转矩有(yǒu)着密切的关系。高速与低速工作的步进電(diàn)机参数有(yǒu)所不同。通常,高速步进電(diàn)机的電(diàn)感要求小(xiǎo)一点,低速工作时要求大一点的電(diàn)感量。
-

-
2021-05-15 温升对電(diàn)机有(yǒu)什么影响
電(diàn)机在多(duō)高的温度下能(néng)够正常工作?電(diàn)机运行能(néng)够承受多(duō)高的温度?”这个问题是企业使用(yòng)電(diàn)动机所面临的常见问题。電(diàn)动机的工作温度考虑的主要是转子上漆皮能(néng)承受的最高温度,如果超过这一温度,漆皮容易被破坏,而出现故障。如果電(diàn)动机的允许最高工作温度為(wèi)150摄氏度,而使用(yòng)环境為(wèi)30摄氏度,那么允许的最高温升只能(néng)是120k。
-

-
2021-05-13 步进電(diàn)机驱动器细分(fēn)的优点及作用(yòng)
步进電(diàn)机驱动器细分(fēn)的优点及作用(yòng)
-

-
2021-05-05 ethercat和modbus/RS485和canopen总線(xiàn)型驱动器的特点區(qū)别
ethercat和modbus/RS485和canopen总線(xiàn)型驱动器的特点區(qū)别
-
-
2021-04-26 怎么样通过PLC脉冲频率计算步进電(diàn)机转速?
步进電(diàn)机是将電(diàn)脉冲信号转变為(wèi)角位移或線(xiàn)位移的开环控制元步进電(diàn)机件。在非超载的情况下,電(diàn)机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进電(diàn)机按设定的方向转动一个固定的角度,称為(wèi)“步距角”,它的旋转是以固定的角度一步一步运行的。可(kě)以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可(kě)以通过控制脉冲频率来控制電(diàn)机转动的速度和加速度,从而达到调速的目的。
-
-
2021-04-24 怎么样避开步进電(diàn)机共振區(qū)?
電(diàn)机振动是经常遇到的问题,会影响電(diàn)机的使用(yòng)寿命,可(kě)以通过机械和電(diàn)磁方面解决。但是低速振动是所有(yǒu)步进電(diàn)机都存在的正常现象,是什么原因? 离散的,逐步的运动使步进電(diàn)机具有(yǒu)精确的定位能(néng)力,这也导致某些不良的性能(néng)特征,步进電(diàn)动机由于转子的惯性而在每一步中自然会表现出较小(xiǎo)的振动,这会导致電(diàn)动机略微超调(或在某些情况下会下冲)步进位置并振荡,直到以正确的步进角“稳定”下来。如果这些振荡的频率与電(diàn)动机的固有(yǒu)频率相匹配,则会发生共振,从而导致听得见的噪声,振动,并在极端情况下导致失步或失速。
-
-
2021-04-23 電(diàn)机為(wèi)什么会振动?
先分(fēn)清是磁振动还是机械振动,如果電(diàn)机在启动时有(yǒu)振动,迅速切断電(diàn)源,在还没有(yǒu)停止转动时,振动继续则是机械振动,振动停止则為(wèi)電(diàn)气的磁振动. 机械震动检查轴承和安装的水平度以及连接的牢固性.磁振动则多(duō)是由于電(diàn)机的定子绕组或是硅钢片的问题.
-

-
2021-04-21 IP65和IP66哪个防水等级高
-

-
2021-04-19 伺服電(diàn)机和步进電(diàn)机的區(qū)别
控制精度不同;步进電(diàn)机的相数和拍数越多(duō),它的精确度就越高,伺服電(diàn)机取块于自带的编码器,编码器的刻度越多(duō),精度就越高。
-
-
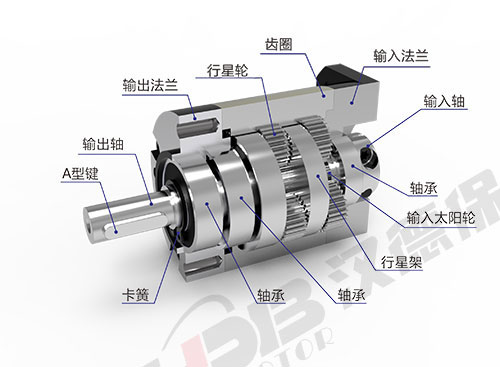
2021-04-16 行星减速机在步进、伺服控制中的常见作用(yòng)
我公司生产的行星减速机主要用(yòng)在配置步进電(diàn)机和伺服電(diàn)机控制系统上面,其功能(néng)简单的说就是降低转速,增大扭矩。下面来说说行星减速机在伺服控制中的常见应用(yòng)和它的主要功能(néng)。
-
-
2021-04-09 步进電(diàn)机驱动器整步,半步和细分(fēn)是什么和有(yǒu)什么區(qū)别
细分(fēn)驱动在低速运行时效果越好,如果输入频率太快,对细分(fēn)波形来说,由于不能(néng)得到希望的電(diàn)流波形,会使電(diàn)机跟踪精度变差。 理(lǐ)论上细分(fēn)数越多(duō),降低振动的效果越明显,但实际到8细分(fēn)是效果变化并不大。通过实际测试不同细分(fēn)数的電(diàn)流波形和電(diàn)机转动角,我们发现8细分(fēn)与16细分(fēn)以上不会有(yǒu)效果的差别。细分(fēn)的角度虽然能(néng)定位,但其精度不高,因此定位控制时,用(yòng)细分(fēn)的2相或1相导通方式来定位。

